Smooth Route Parameterization and Evolutionary Optimization for Efficient Maritime Routing
Environmental Monitoring: An Exploratory Workshop
2023-07-06
Example
Trick 1: Land Avoidance
- Sometimes, the proposed path runs on land
- We heavily penalize any distance that is traversed on land
- But: will not always work if there’s a local minimum
- Example: hourglass-shaped land
- We have some ideas on how to solve that
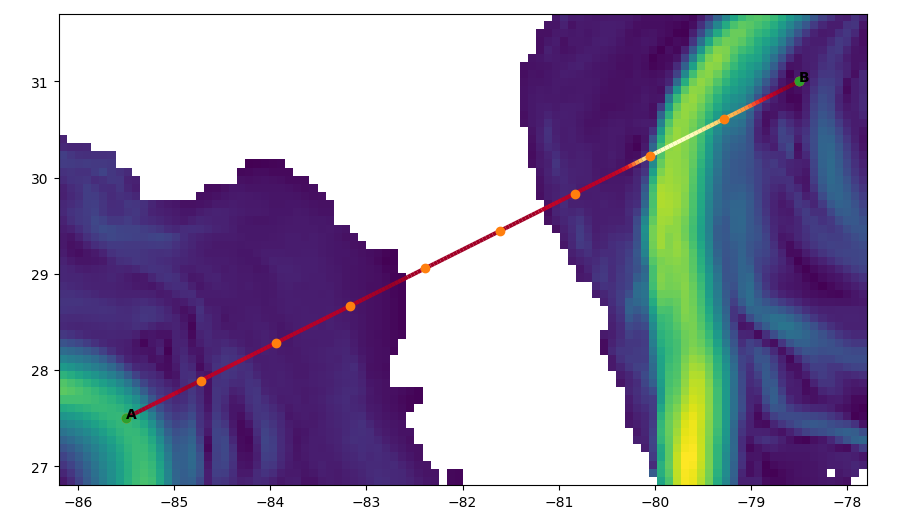
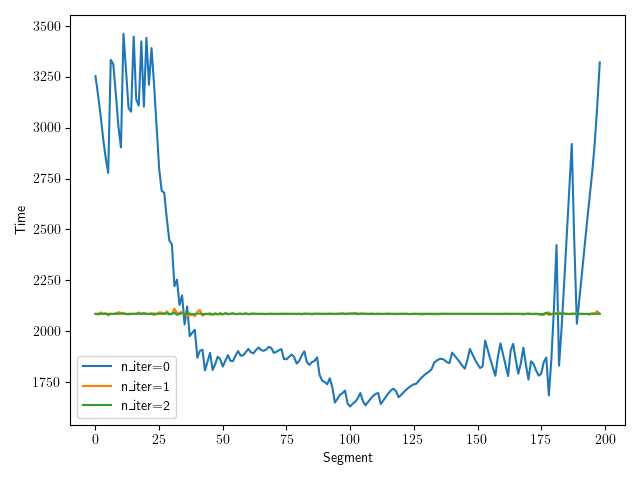
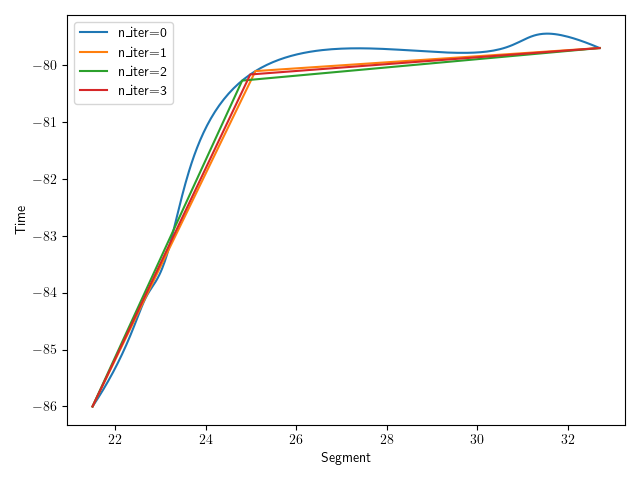
Trick 2: Reparameterization
- A Bézier path does not have constant speed (blue line)
- For better visualization, we reparameterize the final path into equal-time segments
- Iterative process, converges fast:
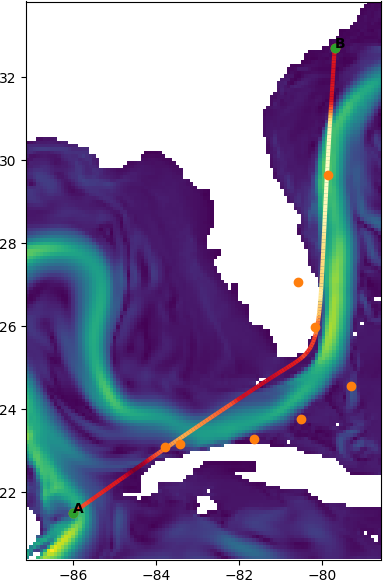
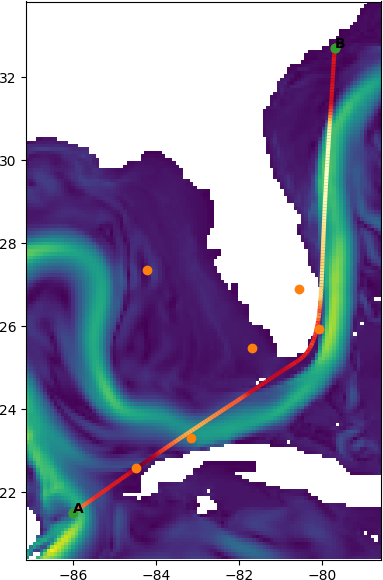
Cancun \(\rightarrow\) Charleston (\(s = 3\))
- Navigation time: 116h
- 7.35% better than geodesic route
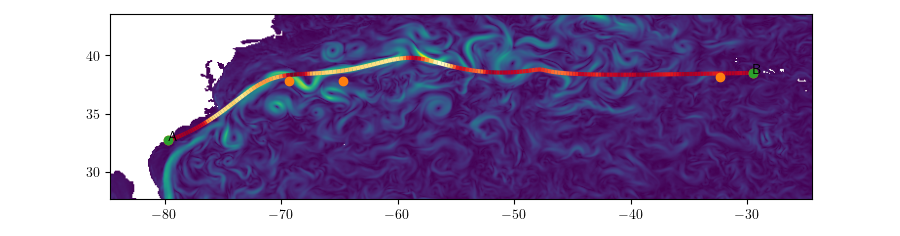
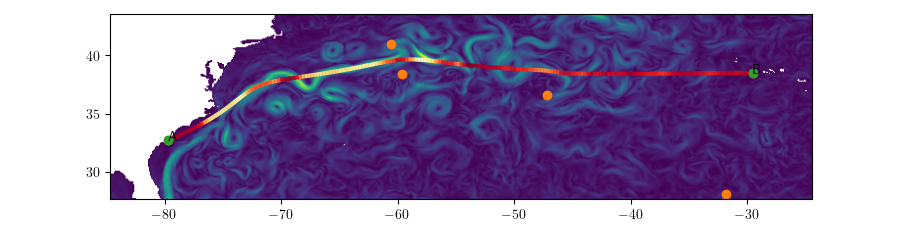
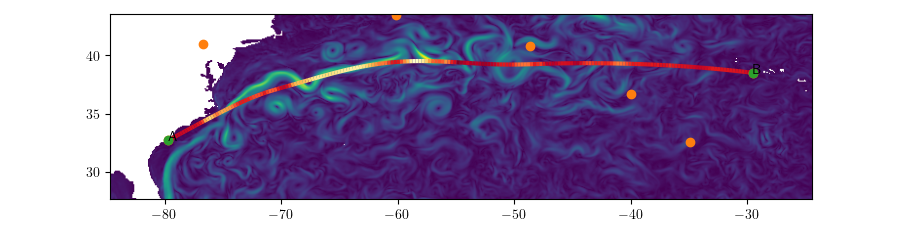
Charleston \(\rightarrow\) Azores (\(s = 3\))
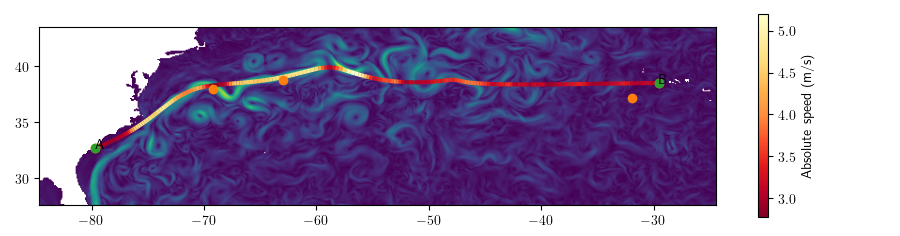
- Navigation time: 365h
- 16.8% better than geodesic route
Panama \(\rightarrow\) Houston (\(s = 3\))
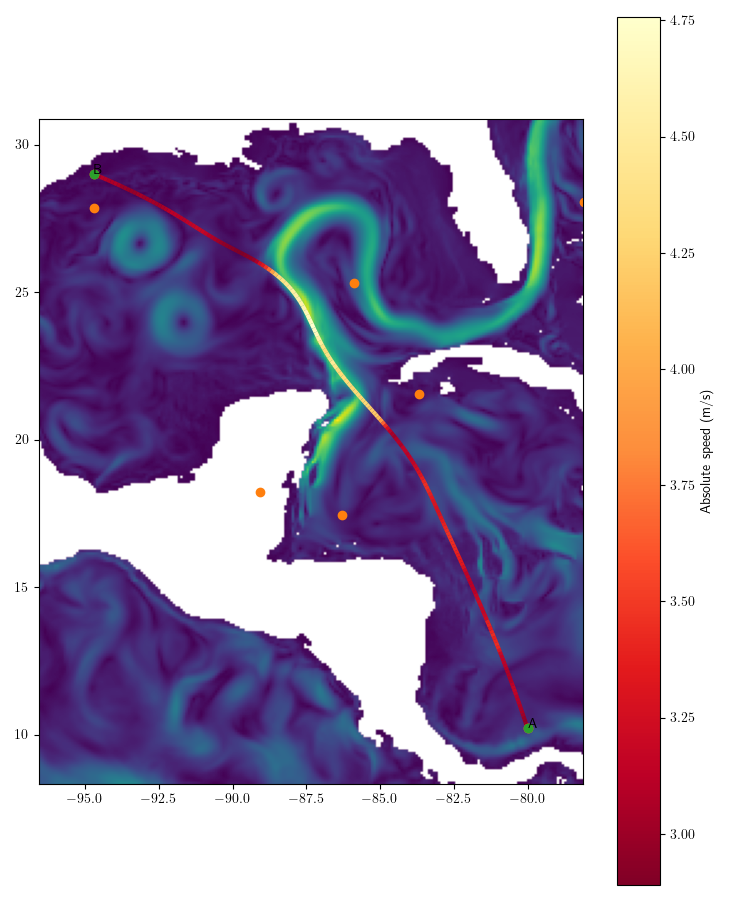
- Navigation time: 221h
- 9% better than geodesic route
Somalia \(\rightarrow\) Myanmar (\(s = 3\))
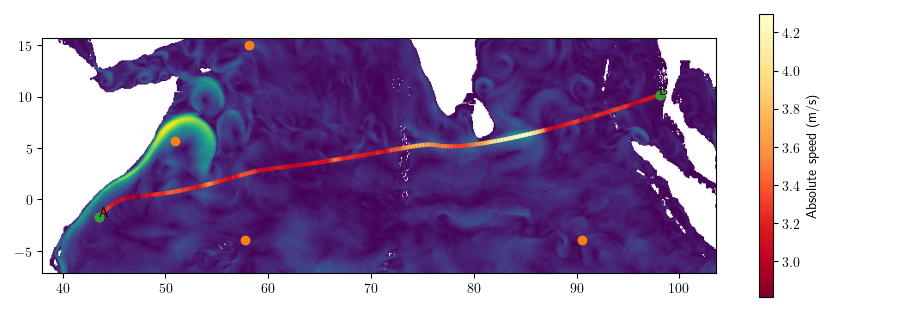
- Navigation time: 527h
- 4.5% better than geodesic route
Expressiveness of Bézier Curves
- Very different control points can yield almost equal curves
- We think this makes it easier to find a global optimum
Expressiveness of Bézier Curves
- Very different control points can yield almost equal curves
- We think this makes it easier to find a global optimum
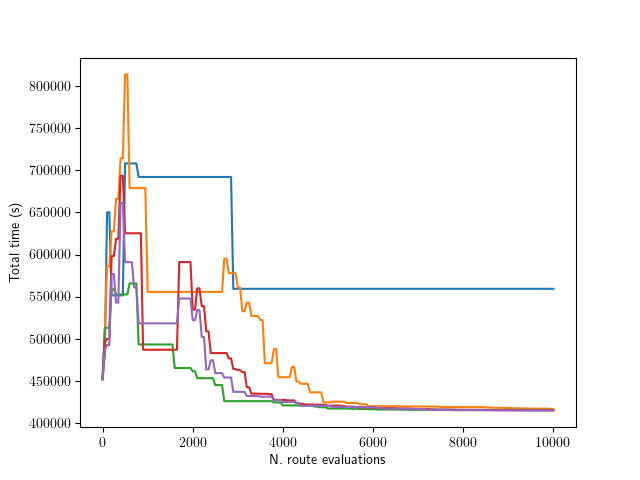
Convergence for Different Seeds
Charleston \(\rightarrow\) Azores, \(s = 3\)
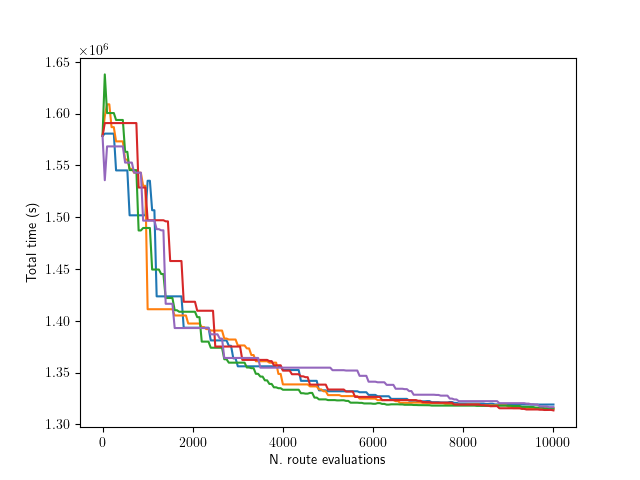
Convergence for Different Seeds
Cancun \(\rightarrow\) Charleston, \(s = 3\)
Land is Tricky

Different Speeds (Charleston \(\rightarrow\) Azores, \(s = 3\))
Different Speeds (Charleston \(\rightarrow\) Azores, \(s = 10\))
Different Speeds (Charleston \(\rightarrow\) Azores, \(s = 30\))
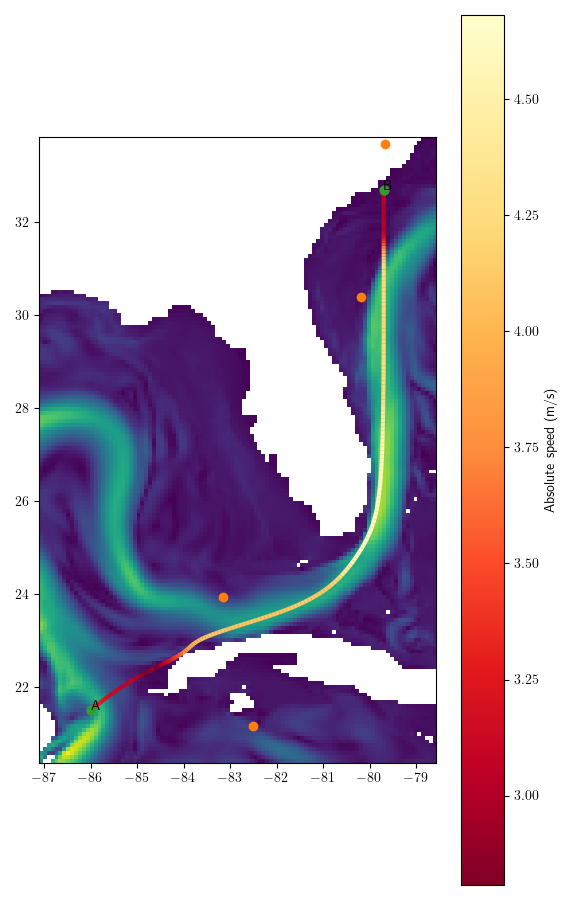
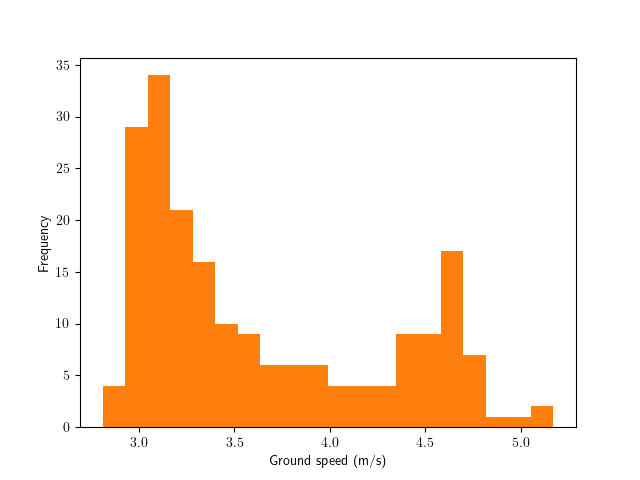
Ground Speed (Charleston \(\rightarrow\) Azores, \(s = 3\))
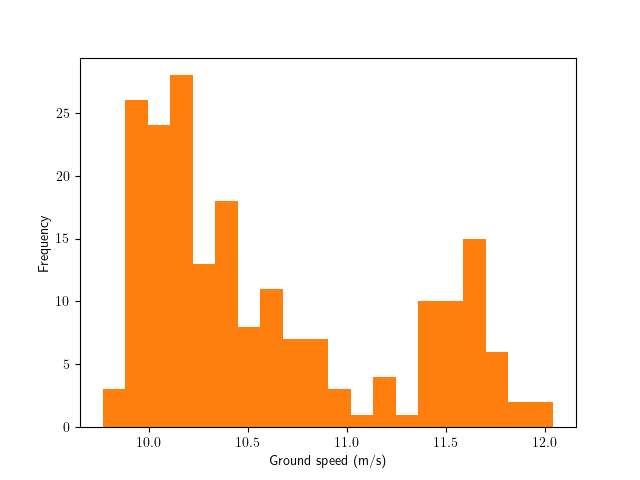
Ground Speed (Charleston \(\rightarrow\) Azores, \(s = 10\))
Thank You For Listening
Arnold, Dirk V., and Nikolaus Hansen. 2012. “A (1+1)-CMA-ES for Constrained Optimisation.” In Proceedings of the 14th Annual Conference on Genetic and Evolutionary Computation, 297–304. GECCO ’12. New York, NY, USA: Association for Computing Machinery. https://doi.org/10.1145/2330163.2330207.
Boehm, Wolfgang, and Andreas Müller. 1999. “On de Casteljau’s Algorithm.” Computer Aided Geometric Design 16 (7): 587–605. https://doi.org/https://doi.org/10.1016/S0167-8396(99)00023-0.
Hansen, Nikolaus, Sibylle D. Müller, and Petros Koumoutsakos. 2003. “Reducing the Time Complexity of the Derandomized Evolution Strategy with Covariance Matrix Adaptation (CMA-ES).” Evolutionary Computation 11 (1): 1–18.
IE University is Hiring!
Tenure-track positions in Computer Science and Data Science
![]()

Example Reparameterization into 3 Points
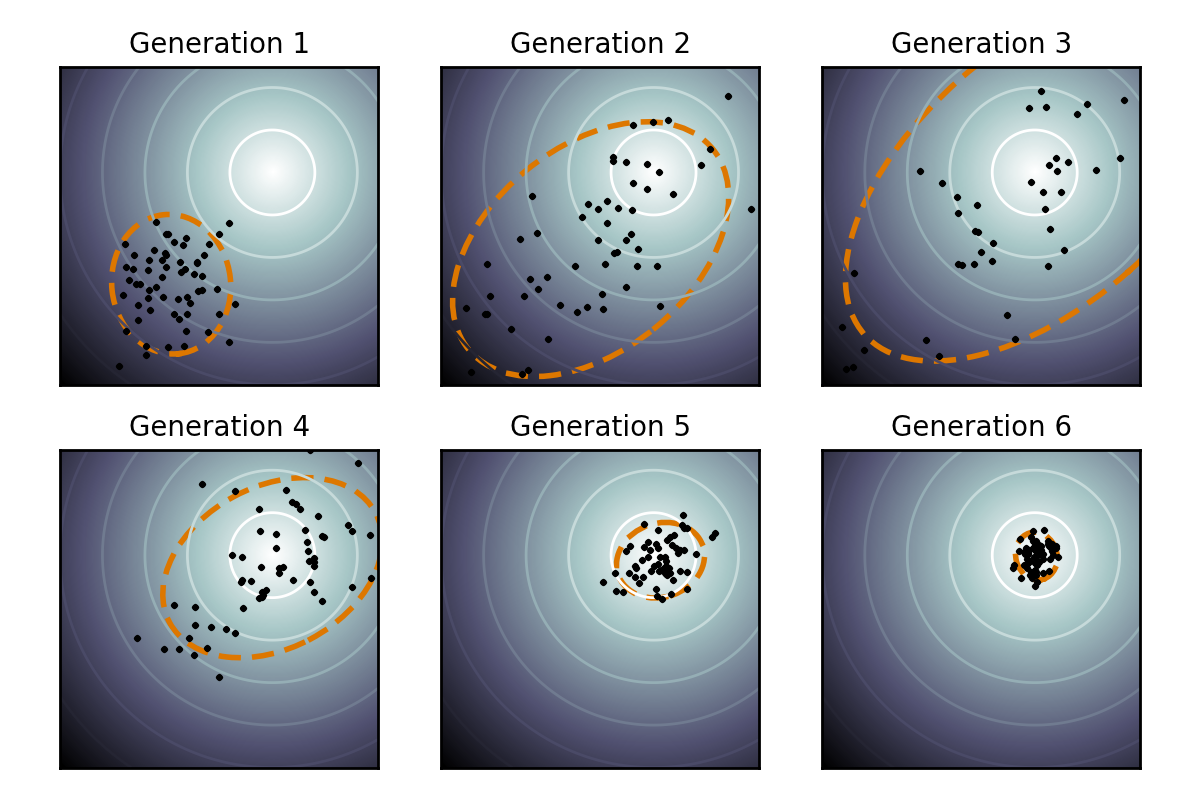
CMA-ES Covariance Adaptation
![]()